




基于预测电流控制的T型三电平并网逆变器研究
时间: 2024-08-20 01:38:41 | 作者: AC电源接口
:本文介绍了一种三相三线制T型三电平并网逆变器系统,根据开关状态建立了其数学模型。针对传统d-q变换的电流内环控制器在三相电压型逆变器中存在着动态响应慢及直流电压波动较大的问题,提出一种以泰勒公式为基础的预测电流操控方法,并采用了基于功率前馈的双闭环控制策略,实现了电流的快速跟踪,减少了电流的谐波含量,提高了系统的动态响应速度。最后,搭建了一台23 kW的实验样机,通过实验样机验证了所提方法和控制策略的可行性。

作者简介:雷兰(1992—),女,通讯作者,助理工程师,研究方向:电力电子变换器、新能源充电桩和电力经营销售等,邮件:。
随着分布式能源的发展,逆变器是新能源系统与电网接口的核心关键设备,其拓扑结构和控制方式直接决定了分布式系统性能的优劣[1]。对于三电平拓扑结构而言,该拓扑结构具有逆变转换效率高、开关器件的电压应力等级低、谐波含量和dv/dt 较低等优点[2-3],而T 型拓扑结构比传统的NPC(Neutral Point Clamped) 拓扑结构具有二极管数量少、转换效率高、功率损耗均匀等优点[4-5]。
对于T 型并网逆变器而言,输出电流控制是逆变器接入并网的关键技术[6],目前最主要的操控方法包括滞环控制、PI(Proportional Integral) 控制和PR(Proportional Resonance) 控制等。滞环操控方法虽具有动态响应速度较快的优点,但在其控制方式下输出的并网电流波形容易失真,而且采样频率较高,加大了并网侧滤波电感设计难度[7]。在同步坐标系的PI 控制方式下,逆变器系统的输出电流以及电网电压或者输出电压分量直接被采样并参与数字控制,由于数学模型之间有耦合的缘故,难以实现输出电流的无静差跟踪。在静止坐标系的PR控制方式下,虽能实现输出电流的无静差跟踪,但PR控制器的参数难以设计[8]。
基于上述分析,本文提出了预测电流控制和功率前馈双闭环控制策略,一方面克服了电网电流谐波对系统的造成干扰的问题,降低了并网输出电流的谐波含量(Total Harmonic Distortion, THD),另一方面改善了整个并网逆变器系统的动态以及静态性能。最后,通过一台23 kW 的逆变器样机验证了所提方法及控制策略的正确性与有效性。
图1 所示为三相三线制T 型并网逆变器的主电路拓扑结构。其中:Udc 为直流电源电压;idc 为直流侧输出电流;C1和C2为直流侧均压电容(C = C1 = C2);UC1和UC2为逆变器正、负母线电压;Lj 为桥臂滤波电感;Qj1- j4 为功率开关器件;ij 为逆变器输出交流电流;ej为电网电压( 全文中的下标j = a,b,c)。
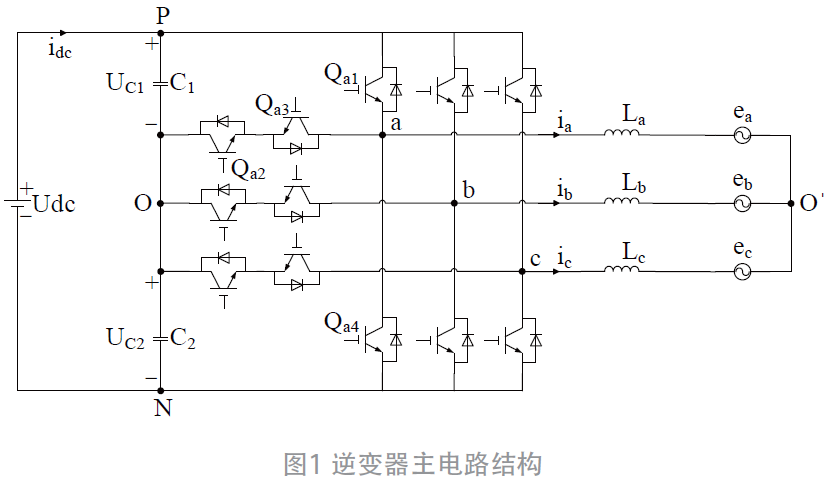
定义Sj 为开关变量,其物理含义为三相桥臂的输出状态。表1 所示为三相桥臂中a 相的开关变量Sa对应该桥臂上各功率开关管的瞬时开关状态[9],b 相桥臂和c 相桥臂与a 相桥臂的开关状态类似。
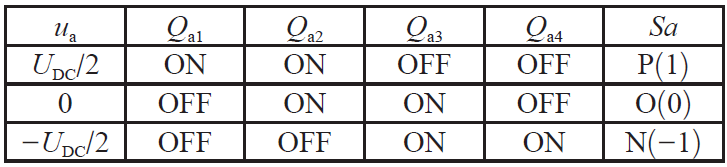
根据对表1 中a 相的开关状态进行研究分析,三相各桥臂电路类似于一个单刀三掷开关,可用开关函数Sj表示,详细表达式为:
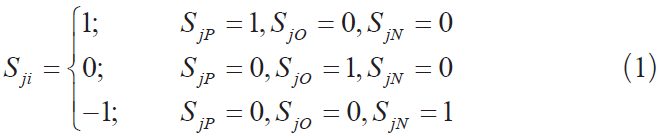
根据基尔霍夫电流定律(Kirchhoff’s Current Law,KCL),可得T 型三电平并网逆变器在三相静止abc 坐标系下的数学模型为[10]:
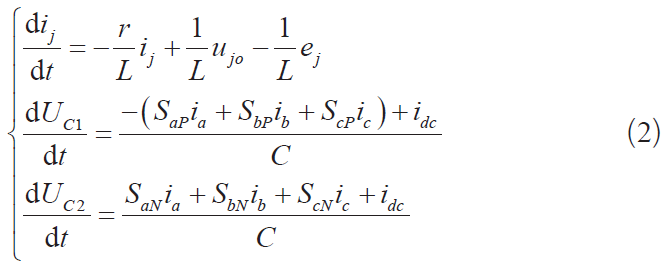
式中:r 为输出滤波电感的等效内阻;ujo 为三相三线制电网中性点到桥臂输出点之间的电压;SjP 和SjN为开关状态。
根据三相平衡原理ea + eb + ec = 0,可知三相T 型三电平并网逆变器的输出电流在两相旋转d-q 坐标系下的数学模型为:
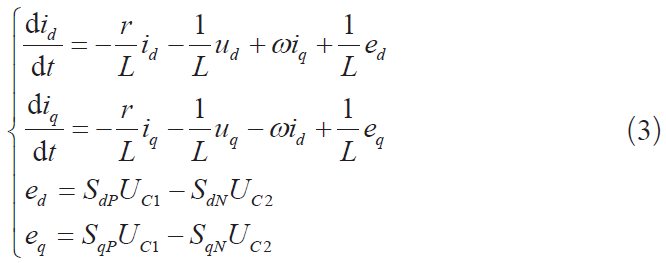
式中:SdP 和SqN 为开关状态;ed,eq 和id,iq 分别为旋转d-q 坐标系下的电网电压和输出并网电流;ud和uq 为旋转d-q 坐标系下的逆变器桥臂输出电压。依据输出侧状态方程(3),能够准确的看出逆变器在d-q坐标系下的数学模型中,d 轴和q 轴之间的函数表达式存在着耦合关系,为实现d-q 轴下的解耦控制,需要在输出电网交流电压中引入前馈控制量-ωid 和ωiq,使其与桥臂输出电压分量ud 和uq 中的耦合项相互抵消。
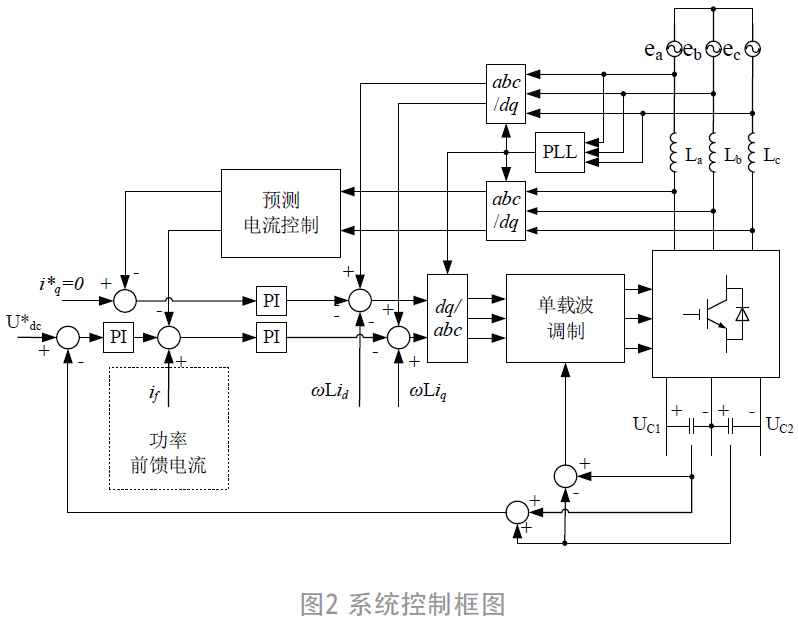
图2 所示为系统整体控制框图。其中:电压外环的作用是对逆变器的直流侧母线电压进行直接控制;电流内环的作用则是按照电压外环输出的电流参考指令进行一定的电流控制,从而改善控制对象;功率前馈控制则提高了逆变器系统的动态响应能力;预测电流控制则降低了输出电流谐波;单载波调制则是为了简化控制并易于数字化控制的实现。
根据瞬时功率理论,可得两相旋转d-q 坐标系下的逆变器输出瞬时有功功率和瞬时无功功率表达式为

由于能量守恒,逆变器的输入功率和额定输出功率处于平衡状态,当无功功率趋于零或者等于零时,此时逆变器正常工作在单位功率因数状态下,即仅向电网输送有功功率,此时eq = 0。为了保持直流侧输出电压的稳定,不受并网电压和交流负载变化的干扰,提出一种功率前馈的操控方法,同时也提高了系统输出并网电流的静态性能。当电网电压保持稳定且忽略逆变器自身的损耗时,逆变器系统的输入功率与并网输出的功率相等,此时前馈电流可表示为:

由于传统的操控方法存在采样延迟和控制精度低的缺点。在利用DSP 进行样机实现时发现,硬件采样电路中的滤波电路会对电流造成延时,而且输出指令参考电流的计算也会造成相应的延时,这对并网电流质量造成巨大的影响。为客服延时造成的这样一些问题,必须对电流的采样过程及计算值进行预测处理。本文采用的预测电流控制是基于当前的电流采样值来预测下一时刻的电流作为反馈电流值,这样就可以消除采样和计算造成的延时。
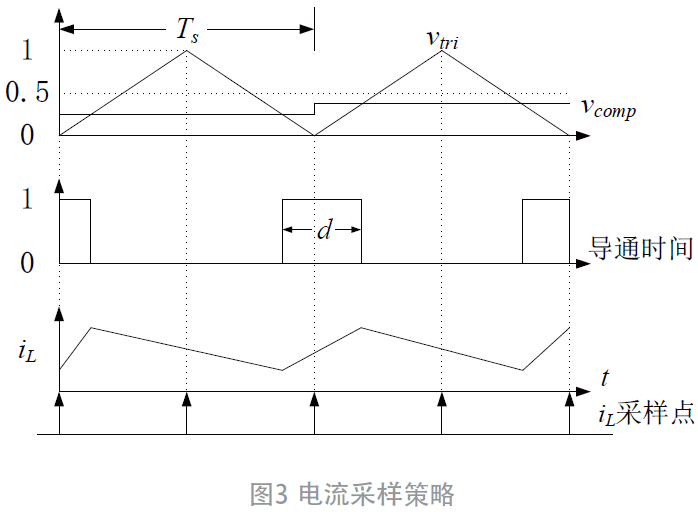
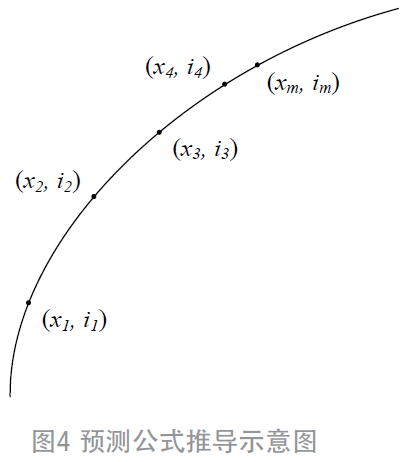
图3 所示为电流采样策略,两次电流的采样是在DSP(Digital Signal Processor) 定时器的周期中断和下溢中断间隔期间完成的。根据硬件电路和所提采样方法,最佳预测时间为Ts/2(Ts为开关周期),预测公式推导如图4。其中:xk 为采样时间;ik 为采样时间对应的采样电流;i4 为当前电流采样值;im 为预测电流值;xk-xk-1=Ts;xm-x4=Ts/2。

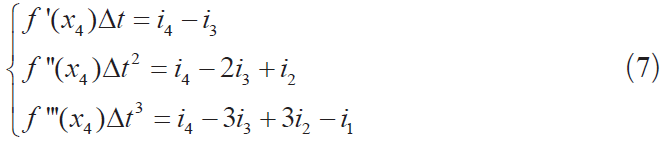
在逆变器系统中,采样时间间隔非常短,则Ts很小。因此在计算导数时可由线性公式近似替代,可知:
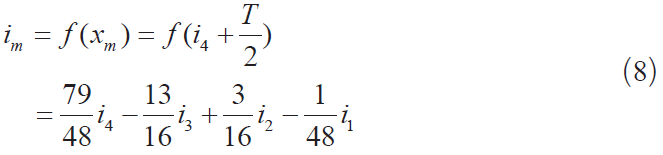
通过泰勒公式进行预测控制,该控制方式相对简单、数字化功能实现较容易,且使系统具备良好的动态以及静态响应能力。
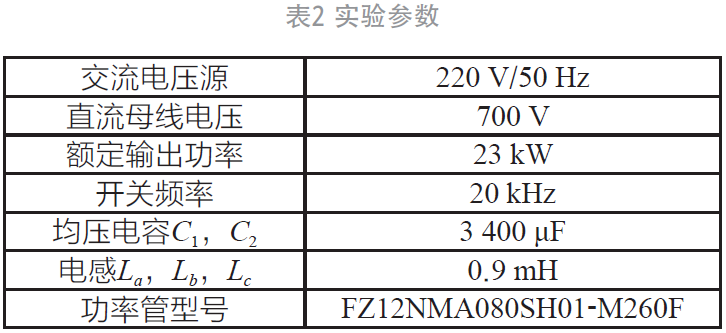
为了验证预测电流控制策略和前馈功率控制的有效性,设计并搭建了额定功率为23 kW 的T 型三电平逆变器样机。表2 为整个逆变系统的实验参数。
当逆变器处于额定输出功率(23 kW) 工作状态时,电网交流a 相电压和输出并网电流的实验波形如图5 所示。从实验波形能够准确的看出,输出并网电流的波形高度正弦化,并与电网交流电压同频率同相位。通过结果分析可知,功率因数为0.999 3,且电网电流的THD 为1.197%。
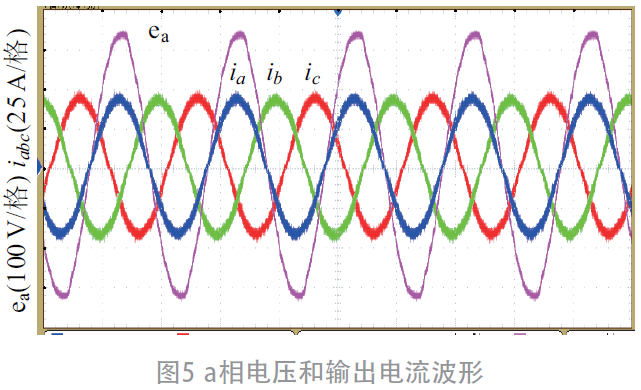
图6 所示为逆变器在直流侧功率突然发生明显的变化时直流母线电压和并网电流的动态性能。能够准确的看出,采用前馈功率控制策略能够更好的降低暂态过程,实现了直流母线电压调节的高性能。
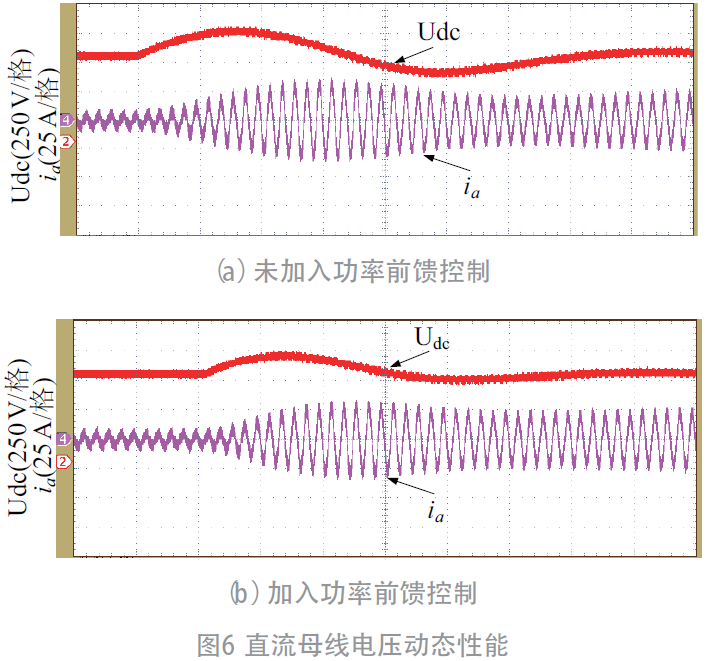
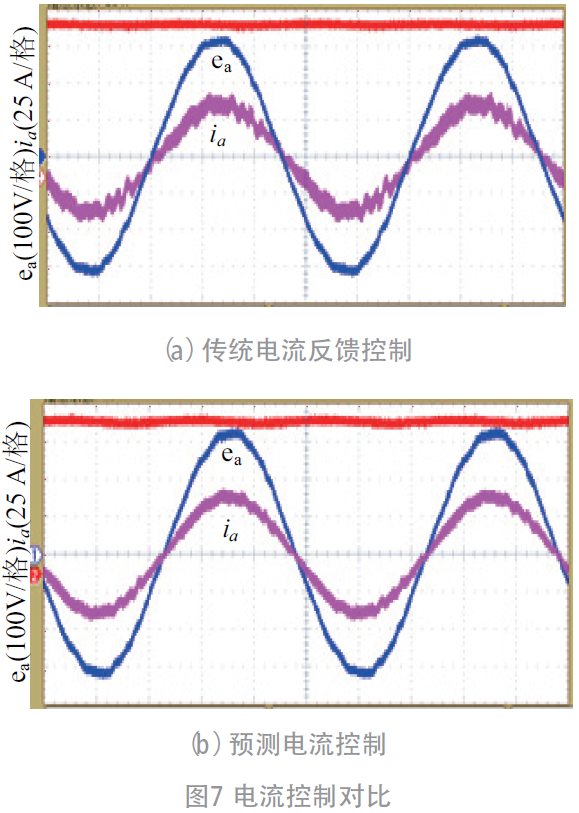
图7 所示为T 型三电平逆变器在17 kW 负载条件下的输出电流和电网相电压波形。通过实验结果比较可知,预测电流控制比传统电流反馈控制的并网输出电流THD 较低。
本文介绍了一种高压大功率的三相T 型三电平并网逆变器。通过预测电流控制策略达到了降低输出并网交流电流THD 的目的,采用功率前馈操控方法则提高了逆变器系统的动态以及静态性能。样机实验结果进一步验证了所提方法和控制策略的正确性及可行性,体现出该逆变系统具有低成本、易于控制等特点。
[5] 童鸣庭.三相T型三电平非隔离并网逆变器的研究[D].合肥:合肥工业大学,2013.
[7] 张兴,张崇巍.PWM整流器及其控制[M].北京:机械工业出版社,2012.
[10] 夏玲芳.T型三电平逆变器技术探讨研究[D].南京:南京航空航天大学,2014.
上一篇:什么是逆变器
下一篇:集中式光伏与分布式光伏的优缺点
